به گزارش آی تابناک : آسانترین کارها برای انسانها میتواند برای هوش مصنوعی سخت و غیر ممکنترین باشد چرا که ما علاوه بر کنترل جسمانی خوب، از نیروی احساس و غریزه برای حرکت در هر نوع سطح ناهمواری استفاده میکنیم. ربات انسان نما هم از ابزار مختلفی به همین منظور استفاده میکند اما گویا تکنیک جدید IHMC پا را فراتر از روشهای قبلی گذاشته است.
برای مثال قبلا در مسابقات رباتیک دارپا، برای هدایت ربات روی سطوح ناهموار، یک اپراتور انسانی کنترل آن را به عهده داشته و نحوه حرکت قدم به قدم آن را تعیین میکرد. این روش شاید در سطوح هموار پاسخگو باشد اما قادر به تنظیم دینامیک حرکات ربات در سطوح ناهموار نخواهد بود. IHMC برای غلبه بر این مشکل سیستمی طراحی کرده که پیش از قدم برداشتن ربات، مسیر پیش رو را ارزیابی و شناسایی میکند. از آن مهمتر در این روش کل مسیر از ابتدا تا انتها شناسایی نمیشود بلکه هر چند وقت و به دفعات دوباره مورد ارزیابی قرار میگیرد. این روش امکان تطابق بهتر ربات را با مسیرهای متغیر فراهم می کند، مثلا اگر مانعی تصادفی یا عمدی بر سر راه آن قرار بگیرد ربات مسیرش را با توجه به آن برنامهریزی میکند.
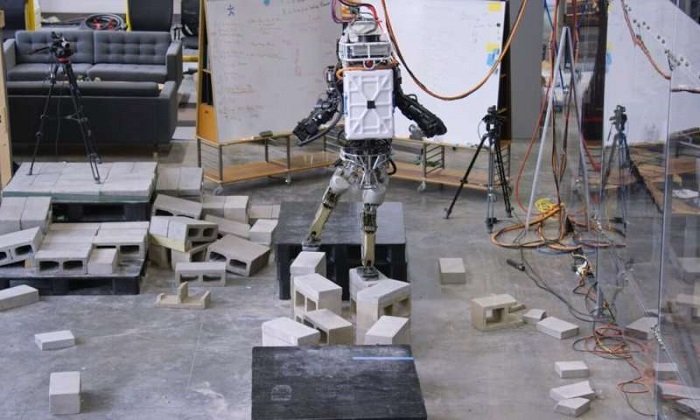
این شرکت روش مذکور را روی رباتهای اطلس بوستون داینامیکس و والکری ناسا مورد آزمایش قرار داده و نتایج چشمگیری به دست آورده است. البته این سیستم هنوز کامل نیست و در مسیرهای خیلی باریک، 50 درصد امکان شکست دارد. با این حال پیشرفت بسیار بزرگی نسبت به هدایت دستی رباتها محسوب شده و عدم تطبیقپذیری با تغییرات ناگهانی محیط را به خوبی پوشش میدهد.







